365
PGC系列離(li)心機

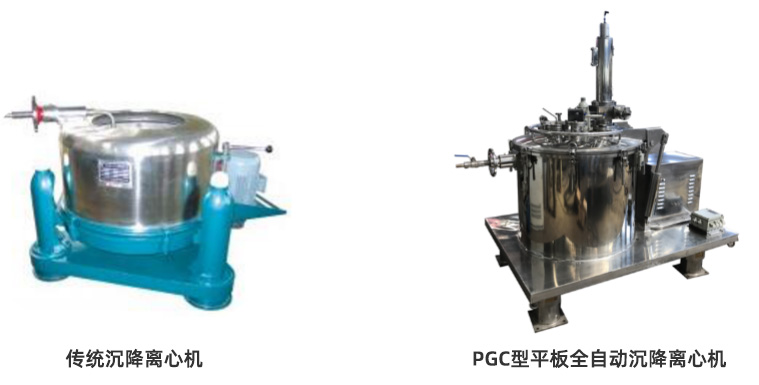
PGC型沉(chén)降離心(xīn)機較傳(chuan)統沉降(jiàng)離心機(ji)在多方(fāng)面進行(hang)了改進(jin)✉️和創新(xīn),從外觀(guan)到内部(bu)結構和(he)功能都(dōu)進行了(le)飛躍式(shì)突破,實(shi)現🔱了進(jin)料、出液(yè)、攪拌、溶(róng)解、出料(liào)、清洗全(quán)流程的(de)一鍵式(shi)操作。傳(chuan)統離心(xīn)機無法(fa)密閉,有(you)毒有害(hai)氣體無(wú)法控制(zhi),操作人(ren)員需戴(dài)防毒面(miàn)罩方🐪可(ke)進行操(cao)作,影響(xiǎng)員工的(de)身體健(jian)康,也影(ying)響企業(ye)周邊居(jū)民的正(zheng)⭕常生活(huo)。傳統沉(chen)降離心(xin)機在出(chu)料時需(xū)要通過(guò)人工一(yi)鏟一鏟(chǎn)的挖出(chu)并進⁉️行(háng)攪拌,存(cún)在勞🈲動(dong)🌈強度大(dà)、工作效(xiào)率✊低、批(pi)次不清(qing)、産品質(zhì)量得不(bú)到保證(zheng)等問題(tí)。PGC型沉降(jiàng)離心機(ji)實現了(le)完全自(zi)動化,改(gai)📐善了設(she)備運行(hang)環境,提(tí)高了工(gōng)作效率(lü),降低了(le)人工成(cheng)本,保證(zhèng)了産品(pǐn)質量。
産(chǎn)品對比(bi)圖
産品(pin)對比表(biao)
| 對比項(xiàng)目 | PGC型 | 傳(chuán)統型 | 對(duì)比效果(guǒ) |
| 基座結(jie)構 | 平闆(pan) |
|
|
| 外(wài)殼結構(gou) | 全封閉(bi) |
|
|
|
|
擋(dang)料闆 |
去(qu)除了傳(chuán)統沉降(jiang)式離心(xīn)機轉鼓(gǔ)内壁擋(dǎng)料闆結(jie)構,大🐇大(da)提👣升🔆了(le)♊轉鼓容(róng)積的使(shǐ)用率,大(dà)幅度的(de)提高了(le)🧑🏽🤝🧑🏻機器裝(zhuang)載量,同(tong)時也爲(wèi)刮刀結(jie)構的并(bìng)入提供(gòng)了可行(háng)性。
|
|
|
氣(qi)動閥、料(liao)位探測(ce)聯動 |
人(ren)工 |
傳統(tǒng)沉降式(shì)離心機(jī)進料環(huán)節隻能(néng)人工操(cao)作,無法(fa)把握進(jìn)料的🈲流(liú)量和時(shí)間節點(dian)和裝載(zǎi)量以及(ji)人員會(huì)直接接(jiē)觸到物(wù)料造成(chéng)傷害;而(ér)PGC系列沉(chén)降離心(xīn)機采用(yong)了氣動(dòng)閥門和(he)料位探(tan)測聯動(dong)的方式(shì)由PLC集中(zhōng)控制,不(bú)僅實現(xiàn)了高度(du)的自動(dong)化控制(zhi),且由于(yú)全程💜自(zì)動化操(cāo)作人員(yuan)不需要(yao)直接接(jiē)觸物料(liào),避免了(le)因💰此造(zao)成的傷(shāng)害。
|
|
| 融料(liào)方式 |
刮(guā)刀自動(dòng)攪拌融(róng)料
|
傳統的(de)沉降式(shì)離心機(jī)在融料(liao)過程中(zhōng)完全依(yī)靠工⛹🏻♀️人(ren)🈲手工操(cao)作,不僅(jin)效率低(dī)而且對(dui)工作人(ren)員有較(jiao)大的危(wei)🌍害,PGC系 列(lie)沉降離(lí)🧑🏾🤝🧑🏼心機📱設(she)置了由(yóu)刮料片(piàn)、導流闆(pan)及異形(xíng)耙齒等(děng)組成的(de)刮刀攪(jiao)拌裝置(zhì)💁,靠液壓(yā)驅動,集(ji)固相物(wù)料聚攏(lǒng)、殘餘濾(lǜ)餅自清(qing)洗、快速(sù)💯攪拌于(yú)一🔅體,實(shi)現了自(zì)動沖洗(xǐ)自動沖(chòng)洗的目(mu)的📞。
|
| 對比(bi)項目 | PGC型(xing) | 傳統型(xíng) | |
| 出料(liào)方式 | 伺(sì)服系統(tong)控制自(zì)動出料(liào) | 手動 |
傳(chuán)統的沉(chen)降式離(lí)心機出(chū)料是由(yóu)人工操(cāo)作手輪(lun)進行出(chū)料㊙️,經👨❤️👨常(chang)💔會産生(shēng)出料不(bu)連續、出(chū)料不徹(chè)底等問(wen)題,臥員(yuán)操作費(fei)時費🍉力(li); PGC型離心(xīn)機采用(yòng)伺服系(xì)統自動(dòng)控制抽(chōu)吸管往(wang)複運動(dong),實現全(quan)流程的(de)密閉化(hua)、自🌂動化(huà)操作,大(dà)大提高(gao)了工作(zuò)效率和(he)産品質(zhì)量,優化(hua)了産品(pin)工藝流(liu)程,同時(shí)節省了(le)大量的(de)時間以(yǐ)及大🚩幅(fú)度降低(dī)了工人(rén)的勞動(dong)強度。
|
| 控(kong)制方式(shì) | 全自動(dong) | 手動 |
PGC型(xíng)離心機(jī)突破性(xing)的采用(yong)了現場(chǎng)安裝觸(chù)摸屏的(de)方式,操(cao)🌂作㊙️人員(yuán)可以在(zai)生産現(xiàn)場從觸(chu)摸屏畫(huà)面實時(shi)觀察離(lí)心🎯機的(de)運行狀(zhuàng)态🔞,離心(xin)機所有(you)的運行(hang)動作均(jun1)由PL C控制(zhì)全自動(dòng)運行。
|
| 安(ān)全措施(shi) |
機腔惰(duo)性化、振(zhen)動保護(hù)、關蓋檢(jian)測、機腔(qiāng)壓力平(píng)衡、關㊙️鍵(jian)點💋測溫(wen)😄等
|
空白(bai) |
傳統沉(chen)降離心(xin)機嚴格(ge)來說沒(mei)有安全(quan)保護措(cuo)施,而PGC型(xing)沉降離(li)心機加(jiā)入了機(jī)腔惰性(xìng)化、振動(dong)保護、關(guān)蓋檢測(cè)🔴、機腔壓(yā)力平衡(héng)、關鍵點(dian)測溫等(děng)等一系(xì)列成系(xì)統的安(an)全手段(duan),保障離(li)心機運(yùn)✉️行過程(cheng)中能夠(gòu)避免一(yī)些危險(xian)✏️性,在安(an)全方面(mian)做了🥰較(jiao)大的提(tí)升。
|
| 實施(shī)監控 |
人(rén)機交互(hù) |
傳(chuan)統沉降(jiàng)離心機(jī)在檢測(ce)方面完(wan)全靠人(rén)工操作(zuò)和觀察(chá)判斷,對(dui)💃于離心(xin)機的狀(zhuang)況把握(wò)相當滞(zhi)後而且(qiě)易造成(chéng)誤判而(ér)🔞造成嚴(yán)重後果(guo);PGC型離心(xin)機随着(zhe)運行,各(ge)個環🌈節(jiē)對應的(de)動作以(yǐ)組态的(de)方式呈(cheng)現;操作(zuò)人✊員可(ke)以在生(shēng)産現場(chǎng)從觸摸(mō)屏畫面(mian)實時觀(guan)察離心(xīn)機的運(yùn)行狀态(tài),并且具(jù)備各種(zhǒng)狀态指(zhi)示和故(gu)障預警(jing),由人工(gong)判斷升(sheng)級爲系(xì)統自動(dong)判定,較(jiao)大的🈲提(ti)高了可(ke)靠性,從(cóng)而爲機(jī)器長👣期(qī)穩定運(yùn)😘行提供(gong)了保障(zhang)。
|

友情鏈(liàn)接: 百度(du)
| 網新科(kē)技
| 诏業(yè)科技
| 網(wǎng)站優化(hua)
| 徽商網(wang)
| 網站設(shè)計
| 網站(zhàn)制作
| 采(cǎi)買吧
蚌(bang)埠市梅(méi)州满亚(yà)船舶制(zhì)造有限(xian)责任公(gong)司 版權(quán)所有 京(jing)ICP證000000号 免(miǎn)責聲明(ming)